 Бары
Бары
 Бисер и шары
Бисер и шары
 Болты и гайки
Болты и гайки
 Кристаллы
Кристаллы
 Диски
Диски
 Волокна и ткани
Волокна и ткани
 Фильмы
Фильмы
 Хлопья
Хлопья
 Пены
Пены
 Фольга
Фольга
 Гранулы
Гранулы
 Медовые соты
Медовые соты
 Чернила
Чернила
 Ламинат
Ламинат
 Шишки
Шишки
 Сетки
Сетки
 Металлизированная пленка
Металлизированная пленка
 Тарелка
Тарелка
 Порошки
Порошки
 Род
Род
 Простыни
Простыни
 Одиночные кристаллы
Одиночные кристаллы
 Мишень для напыления
Мишень для напыления
 Трубки
Трубки
 Стиральная машина
Стиральная машина
 Провода
Провода
 Конвертеры и калькуляторы
Конвертеры и калькуляторы
 Пишите для нас
Пишите для нас
Предыдущие проекты - Прототип подвижного робота
В этой статье я хочу рассказать о своем ценном проекте - прототипе подвижного робота, который я и команда других студентов-инженеров разработали для моего класса ENED (инженерное образование). Специфика проекта заключалась в создании прототипа подвижного робота (PMR), который мог бы поднимать груз определенного материала, идентифицировать его по весу, а затем доставлять его на определенную станцию утилизации в пределах объекта. Нам было предложено представить только бумажный прототип, так как его создание было логистически невозможно из-за пандемии COVID-19. Однако, даже имея только бумажный прототип, наша команда все равно должна была думать об используемых материалах и о том, как они повлияют на конечную конструкцию.
На занятиях по инженерному делу нам было поручено использовать специальное программное обеспечение для визуализации под названием BrickLinks, чтобы создать изображения того, как будет выглядеть физический прототип робота. BrickLinks - это программное обеспечение, которое позволяет пользователям создавать вещи из кирпичиков LEGO, и поэтому созданный нами прототип, если бы он был построен, был бы построен с использованием кирпичиков LEGO. Все кирпичики и детали LEGO сделаны из очень прочного вида пластика, называемого акрилонитрил-бутадиен-стирол или (ABS).1 То, что робот сделан из прочного пластика, было важно, поскольку он должен быть достаточно легким, чтобы мотор на его спине мог эффективно работать, но он также должен быть достаточно прочным, чтобы удерживать контейнеры с материалами, чтобы он мог определять их по весу. Кроме того, ноги PMR должны были быть спроектированы с учетом препятствий, а шины не допускались. Поэтому наша команда решила использовать резиновые детали LEGO, сделанные из того же материала, что и шины LEGO, но без оси посередине. LEGO использует резину, которая очень похожа на резину, используемую в настоящих шинах,2 и представляет собой сочетание бутадиенового каучука, стирольного каучука и натурального каучука.3 Мы специально сделали ноги PMR из резинового материала, чтобы прототип был более устойчив на неровной поверхности и на сложных или неровных участках. Кроме того, ноги были установлены на шарнирах, которые позволяли им качаться вперед-назад, что давало роботу возможность сохранять устойчивость в неровных условиях.
Чтобы лучше объяснить конструкцию: PMR следует по нарисованной линии на полу склада, понимая, когда нужно повернуть направо или налево, благодаря датчикам освещенности с обеих сторон (решение сделать мобильность PMR основанной на нарисованной линии на полу было не нашим решением, а предоставленным нам условием). Мозг робота находится в консоли LEGO, установленной на его спине, которая также служит мотором для шести ног. Спереди находится система шкивов, с помощью которой робот поднимает контейнеры с материалами. Внешний вид PMR был вдохновлен пауками и тем, как работают их ноги, так как мы должны были основывать наш дизайн на способе передвижения животного, в соответствии с правилами класса.
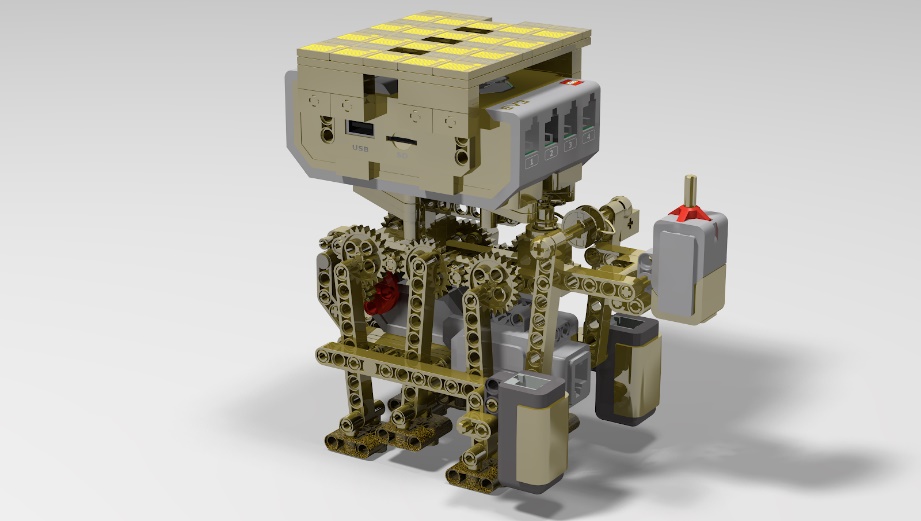
Выше прилагается окончательный рендер робота в программе BrickLinks. Как видно из рисунка, робот должен был быть сделан из материала, который был бы достаточно прочным, чтобы не только поддерживать сервопривод и мотор в верхней части робота, но и два датчика света в нижней передней части. Материал PMR также должен был быть достаточно гибким, чтобы удерживать систему шкивов в передней части, которая должна была иметь возможность становиться полностью вертикальной и горизонтальной, чтобы поднимать контейнеры с материалами, измерять их вес и доставлять их к месту назначения. К счастью, обычный пластик LEGO покрывает все необходимые нам аспекты, поэтому робота не пришлось собирать из специальных деталей или 3D-печатных деталей, за исключением ног. Пластик отлично подходит для шасси и шкивов PMR, но он очень жёсткий и совсем не гибкий и не эластичный. Это означает, что ноги, сделанные из пластика LEGO, будут плохо держаться на неровной или сложной местности, что было обязательным условием для нашего проекта. В связи с этим команда решила обратиться к более совершенному материалу, который бы обладал большей эластичностью. В итоге мы решили использовать размеры маленькой версии детали, используемой для ног робота, но сделанной из резины шин LEGO. Эту деталь придется делать на заказ, но она относительно небольшая, и ее нужно всего 6 штук. Ноги будут установлены на вращающуюся почти на 90 градусов ось, чтобы робот мог регулировать сцепление с поверхностью при движении по неровному полу или препятствиям.
В итоге для этого проекта использовались самые современные материалы - смесь синтетического и натурального каучука, а также ABS-пластик. Пластик обеспечил жесткость корпуса робота, но при этом сохранил гибкость его несущей системы. Резина использовалась для увеличения тягового усилия робота и придания ему способности эффективно передвигаться по труднопроходимой местности.
Библиография:
- Пикеринг, Дэвид (1999). The Ultimate LEGO Book. New York: Dorling Kindersley. ISBN 0-7894-4691-X.
- Threewitt, C. (2020, September 11). Вы никогда не догадаетесь, какая компания производит самые большие в мире шины. https://entertainment.howstuffworks.com/lego-tires.htm.
- S. Tire Manufacturers Association. (2020). What's in a tire. What's In a Tire | USTMA . https://www.ustires.org/whats-tire-0#:~:text=The%20two%20main%20synthetic%20rubber,in%20combination%20with%20natural%20rubber.
Примечание: статья представлена на стипендию Stanford Advanced Materials College Scholarship 2021.
Хуан Игнасио Альварадо
Стипендия Stanford Advanced Materials
Университет Цинциннати


 Chin Trento
Chin Trento



